STM HAL ADS8341E
TI社のADS8341EをSPIで動かしてみる。
【テスト回路の作製】
https://www.ti.com/product/ja-jp/ADS8341/part-details/ADS8341E/2K5
丁寧に、リアルな見た目の回路図がデータシートに載っているのでその通りに回路をブレッドボードに作る。


マニュアルより引用
SPI関係のワイヤーを接続する前はこんな感じ。(コンデンサーは別に割愛しても動くが・・・)
ジャンパーワイヤーを使ってSPIのピンにあわせの配線もこのあとやってやる。
【コーディング】
新規ファイルーSTM32 projectを立ち上げる。
ConnectivityでSPI1を選択し、Full Demux Masterを選択。PIN3をCSピンとしてGPIP outputとして設定する。
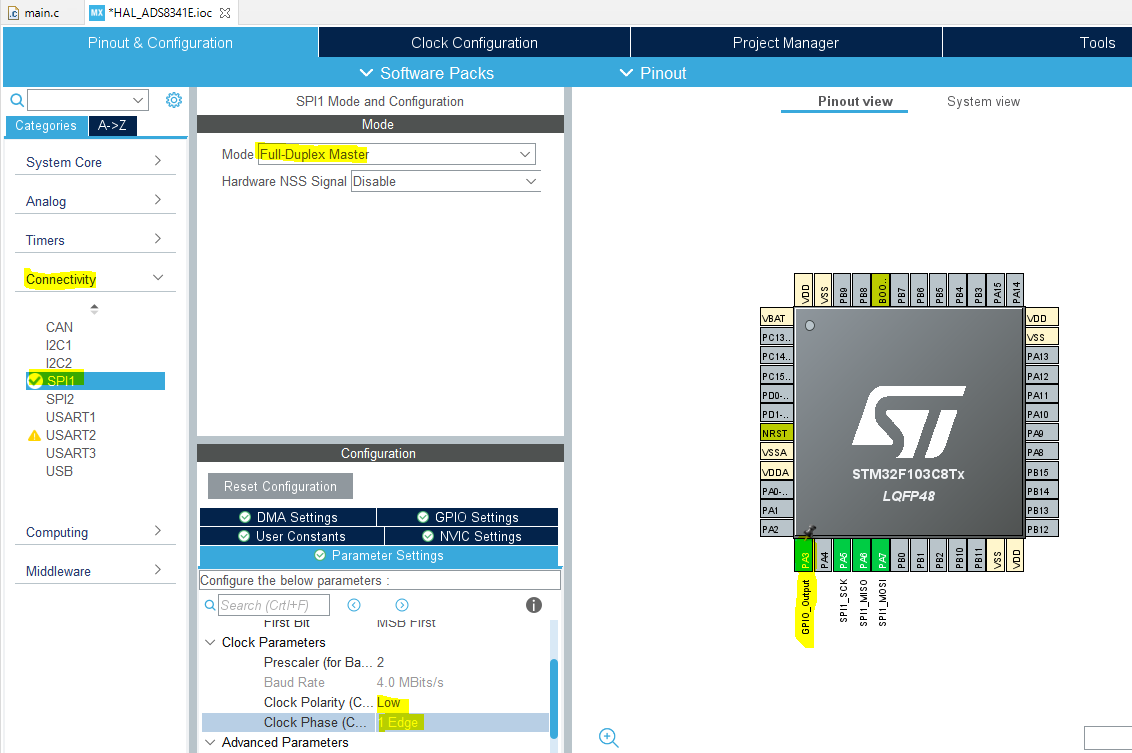
クロックは待機状態の時LOWなのでCPOLをLOWを選択、CPHAは1stEdgeを選択しておく。


ConnectivityのUSBも選択、Device(FS)にもチェックを入れる。
チェックを入れるとMidlewareの所にUSB_DEVICEが反転選択できるようになるので、ClassはCDCを選択する。
USBを使うのでクロックとしてちゃんとしたものが必要なので、

次いでクロックのClock Configrationのタブを開いてクロックの調整をする。

これでUSBのクロックを設定すると今度は、SPIのクロックがエラーになるはずなので
Prescalerを設定する4以上を選択する。ADS8341 は、2.4MHz を超えるクロック・レートでデータをシフト・イン/アウトすることができるが、但し、最小収集時間ACQは1.7μs以上に保たれると記載がある。4ビット分のクロックで1.7usecだから、1.7/4=0.425usec/
bitで、クロック周波数に直すと、1/0.425=2.35MHz?
(結果的に実験的に、Prescalerを最速の4、18MHzなどで動作させても動く)
ここではテストなので64と遅く設定した。
これで設定は一旦終了で、コードを吐き出させる。

このADCちょっと癖があって、データを完全に読み出すために最低25クロックサイクルが必要になる。ほとんどのマイクロプロセッサーは8ビット転送で通信するのでこれはLSBをキャプチャするために追加で読み取りをしないといけないってのが癖。
よく見ると、DINが終わってから、1クロックサイクル分空白があってDOUTが始まる。よって16ビット分読むと最後の1つがはみ出る。それを読みとるため追加しないといけない。24ビット読み込んでやる。
これを理解して、変数を定義する。
ここでは、一度、使い方の理解のために、”一度動かないコーディングをしてそれを動くように編集していく”
後で関数化する事も考えて、mainの中で定義。
/* USER CODE BEGIN 2 */
//variable
uint8_t control_bits;
uint8_t SPI_RX_buffer[3];
uint16_t ReceivedData;
uint8_t Dummy;
float Vadcref=1.80;
float V1;
control_bitsは8ビット
受け取るのは16ビットだが、25サイクル(送信に8ビット、残り17ビット)なので、24ビット分を確保するので、SPI_RX_buffer[3];と配列を用意する。
Dummyは聞かないで、後でビットシフトする時に使う。
mainの中で、CSピンを初期化としてHIGHにしておく。
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET);
while の中に今度は記載する。
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
control_bits=0b10010100;
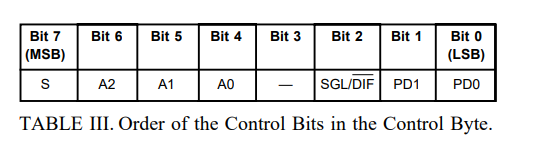
S はいつもHIGHでないといけないので、1。スタートで、ここが1になってから10個目のクロックでADCからマイコンに出力される。
A2~A0部分は、チャンネルで、SGL/DIFはシングルか差動かで選ぶ。


次にこれらをMOSIで送り込み、かえってくる値を読む
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, &control_bits, 1, 100);
HAL_SPI_Receive(&hspi1, &SPI_RX_buffer[0], 3, 100);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET);
CSピンを下げてやって、送り込んで、3ビット分を読み込む、そしてCSピンをあげる。
これで動作すると思いきや動かないので注意。他のマイコンを触っているとちょっとこの点は難しい。HAL_SPI_Receive命令を出すとクロックも同時に生成してくれるからその点は問題がないが、MOSIの方が思ってもみない動きをする。

control_bits=0b10010100;を送り込んだあとに、HIGHになり、またLOWになったりと命令は送っていないが、何かを送信してしまう(電磁誘導で隣のラインの信号をひらっている??それなら最終的には回避できているので、それではなく、ソフト的な問題)。マイコン側は、SがHIGHになったと思ってしまうので、BUSYがその都度にHIGHになることから、変換をしに行ってしまう・・・・
HAL_SPI_TransmitReceive(&hspi1, &control_bits[0], &SPI_RX_buffer[0],4, 100);
というコマンドで送受をすると回避できる。
この時、control_bitsは送信から受信が終わるまで用意してやる必要がある。送信に1バイト、受信に3バイト使っているので、4バイト分を用意する。送信1バイト+受信3バイト=4バイトの4を最後から2番目の引数にいれる。そして送信ビットの配列の数はこの4に合わせる。
//variable
uint8_t control_bits[4];
と配列4つ書き換える。
その後、メインの中は、
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
control_bits[0]=0b10010100;
control_bits[1]=0x00;
control_bits[2]=0x00;
control_bits[3]=0x00;
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&hspi1, &control_bits[0], &SPI_RX_buffer[0],4, 100);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET);
としてあげると

狙い通りの動きをしてくれる。(ここではVrefは1.8Vだが強制的に3.3Vを入力して16ビットが0xFFFFになるようにしてテストしている。
これで受信はできたが、実際の電圧にはなっていないし、そもそもビットがずれている。
ビットシフトを使って、直してやる。
//----1st byte----/
SPI_RX_buffer[1]=SPI_RX_buffer[1] << 1; //shift 1 bit to left
//2nd byte shift 7 bit to right
Dummy=SPI_RX_buffer[2] >>7;
// new 1st byte
SPI_RX_buffer[1]=SPI_RX_buffer[1] | Dummy;
//----2nd byte----//
SPI_RX_buffer[2]=SPI_RX_buffer[2] <<1; //shift 1 bit to left
//3nd byte shift 7 bit to right
Dummy=SPI_RX_buffer[3] >>7;
//----new 2nd byte----
SPI_RX_buffer[2]=SPI_RX_buffer[2] | Dummy;
ReceivedData=SPI_RX_buffer[1] <<8 | SPI_RX_buffer[2];
V1=Vadcref*ReceivedData/65536;
解説はもうやらないけど・・・ロジアナの図を見ているとわかると思う。

最後に表示をしてやる
sprintf(cdcBuffer, "V1=%f\n\r",V1);
while(CDC_Transmit_FS((uint8_t*)cdcBuffer, strlen(cdcBuffer)) == USBD_OK) {}
HAL_Delay(500);
floatを表示するので、以下のチェックをOptionを開いていれる。

無事に動いていれば、

電圧が表示される。
関数化し4ch分を読めるようにしておく。
/* USER CODE BEGIN 4 */のところにでも、
float Read_ADS8341(uint8_t ch)
{
//variable
uint8_t control_bits[4];
uint8_t SPI_RX_buffer[3];
uint16_t ReceivedData;
uint8_t Dummy;
float Vadcref=1.80; //reference voltage
switch(ch) {
case 0: //Channel 0
control_bits[0]=0B10010111;
break;
case 1: //Channel 1
control_bits[0]=0B11010111;
break;
case 2: //Channel 2
control_bits[0]=0B10100111;
break;
case 3: //Channel 3
control_bits[0]=0B11100111;
break;
default:
control_bits[0]=0B10010111;
}
control_bits[1]=0b00000000;
control_bits[2]=0b00000000;
control_bits[3]=0b00000000;
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&hspi1, &control_bits[0], &SPI_RX_buffer[0],4, 100);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET);
//----1st byte----/
SPI_RX_buffer[1]=SPI_RX_buffer[1] << 1; //shift 1 bit to left
//2nd byte shift 7 bit to right
Dummy=SPI_RX_buffer[2] >>7;
// new 1st byte
SPI_RX_buffer[1]=SPI_RX_buffer[1] | Dummy;
//----2nd byte----//
SPI_RX_buffer[2]=SPI_RX_buffer[2] <<1; //shift 1 bit to left
//3nd byte shift 7 bit to right
Dummy=SPI_RX_buffer[3] >>7;
//----new 2nd byte----
SPI_RX_buffer[2]=SPI_RX_buffer[2] | Dummy;
ReceivedData=SPI_RX_buffer[1] <<8 | SPI_RX_buffer[2];
return Vadcref*ReceivedData/65536;
}
変数をADSからのバックしてくる変数を定義
/* USER CODE BEGIN PV */
char cdcBuffer[64];
float ADS8341_RX_buffer[4];
/* USER CODE END PV */
作った関数の定義をPFPの所にいれる。
/* USER CODE BEGIN PFP */
float Read_ADS8341(uint8_t ch);
/* USER CODE END PFP */
main関数を以下のように編集する。
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
for (uint8_t i = 0; i<4; i++){
ADS8341_RX_buffer[i]=Read_ADS8341(i);
}
sprintf(cdcBuffer, "V0=%f, V1=%f, V2=%f, V3=%f\n\r",ADS8341_RX_buffer[0],ADS8341_RX_buffer[1],ADS8341_RX_buffer[2],ADS8341_RX_buffer[3]);
while(CDC_Transmit_FS((uint8_t*)cdcBuffer, strlen(cdcBuffer)) == USBD_OK) {}
HAL_Delay(500);
}
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2023 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usb_device.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usbd_cdc_if.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi1;
/* USER CODE BEGIN PV */
char cdcBuffer[64];
float ADS8341_RX_buffer[4];
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_SPI1_Init(void);
/* USER CODE BEGIN PFP */
float Read_ADS8341(uint8_t ch);
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SPI1_Init();
MX_USB_DEVICE_Init();
/* USER CODE BEGIN 2 */
//for initilizing of ADC
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
for (uint8_t i = 0; i<4; i++){
ADS8341_RX_buffer[i]=Read_ADS8341(i);
}
sprintf(cdcBuffer, "V0=%f, V1=%f, V2=%f, V3=%f\n\r",ADS8341_RX_buffer[0],ADS8341_RX_buffer[1],ADS8341_RX_buffer[2],ADS8341_RX_buffer[3]);
while(CDC_Transmit_FS((uint8_t*)cdcBuffer, strlen(cdcBuffer)) == USBD_OK) {}
HAL_Delay(1000);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USB;
PeriphClkInit.UsbClockSelection = RCC_USBCLKSOURCE_PLL_DIV1_5;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief SPI1 Initialization Function
* @param None
* @retval None
*/
static void MX_SPI1_Init(void)
{
/* USER CODE BEGIN SPI1_Init 0 */
/* USER CODE END SPI1_Init 0 */
/* USER CODE BEGIN SPI1_Init 1 */
/* USER CODE END SPI1_Init 1 */
/* SPI1 parameter configuration*/
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_4;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI1_Init 2 */
/* USER CODE END SPI1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
/*Configure GPIO pin : PA3 */
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
float Read_ADS8341(uint8_t ch)
{
//variable
uint8_t control_bits[4];
uint8_t SPI_RX_buffer[3];
uint16_t ReceivedData;
uint8_t Dummy;
float Vadcref=1.80; //reference voltage
switch(ch) {
case 0: //Channel 0
control_bits[0]=0B10010111;
break;
case 1: //Channel 1
control_bits[0]=0B11010111;
break;
case 2: //Channel 2
control_bits[0]=0B10100111;
break;
case 3: //Channel 3
control_bits[0]=0B11100111;
break;
default:
control_bits[0]=0B10010111;
}
control_bits[1]=0b00000000;
control_bits[2]=0b00000000;
control_bits[3]=0b00000000;
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&hspi1, &control_bits[0], &SPI_RX_buffer[0],4, 100);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET);
//----1st byte----/
SPI_RX_buffer[1]=SPI_RX_buffer[1] << 1; //shift 1 bit to left
//2nd byte shift 7 bit to right
Dummy=SPI_RX_buffer[2] >>7;
// new 1st byte
SPI_RX_buffer[1]=SPI_RX_buffer[1] | Dummy;
//----2nd byte----//
SPI_RX_buffer[2]=SPI_RX_buffer[2] <<1; //shift 1 bit to left
//3nd byte shift 7 bit to right
Dummy=SPI_RX_buffer[3] >>7;
//----new 2nd byte----
SPI_RX_buffer[2]=SPI_RX_buffer[2] | Dummy;
ReceivedData=SPI_RX_buffer[1] <<8 | SPI_RX_buffer[2];
return Vadcref*ReceivedData/65536;
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/



コメント
コメントを投稿